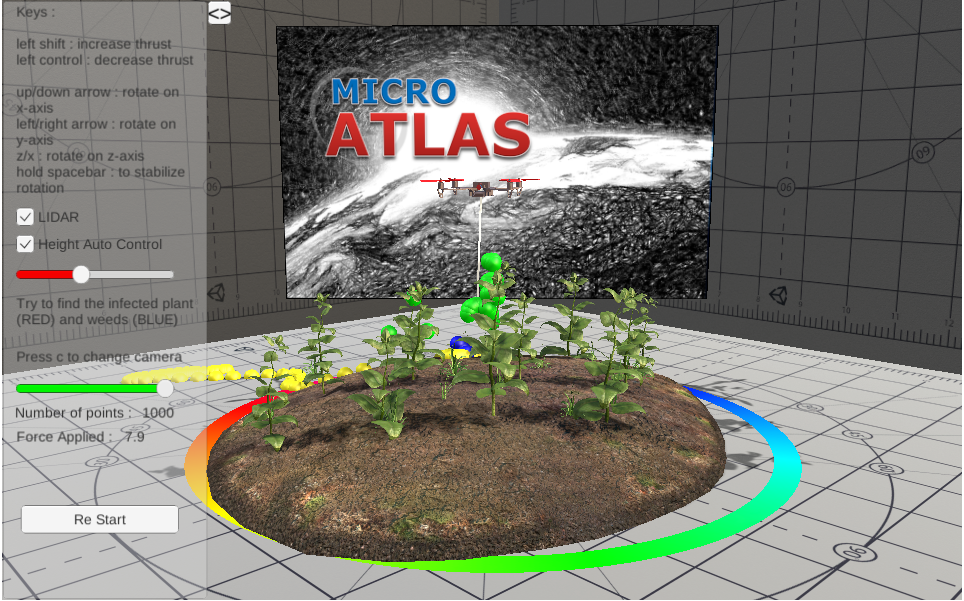
LIDAR DRONE
Written as part of a competition for early career researchers to gain experience; pitching a scientific project to a group of potential investors.
The autonomous drone idea was based on the concept of a light weight networked drone capable of light imaging detection and ranging (LIDAR) employing additional hyperspectral imaging sensors. The data collected would create a 3D point cloud revealing extra information about crop health.
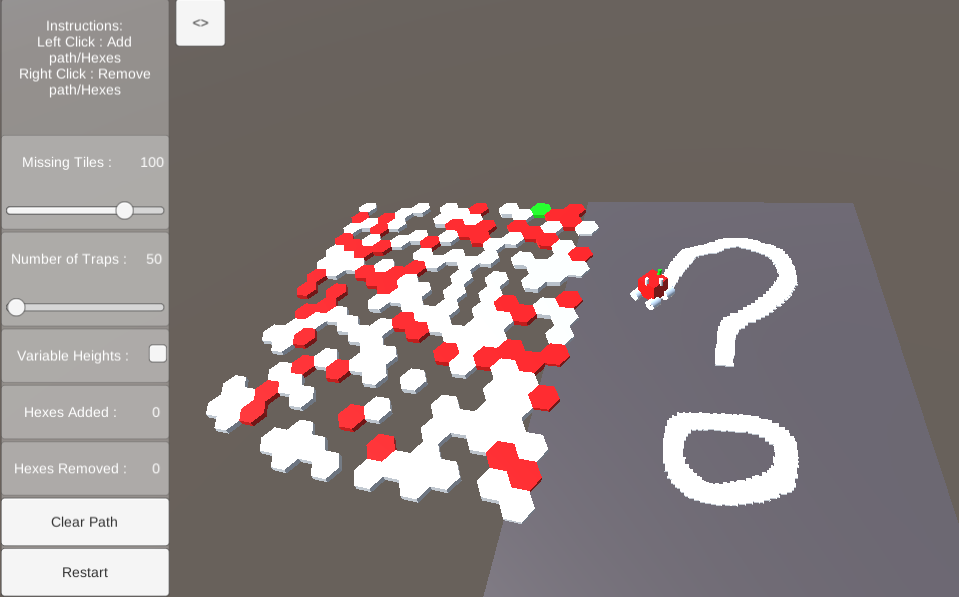
AUTONOMOUS GUIDED ROVER
Written as an example of a simple rover capable of following white lines to navigate an previously unknown enviroment.
The rover uses RayCasts to attempt to detect simple plane objects that can be instantiated with a left click to a second object collider. (eg painted on the surface).
Upon detection of these objects directly under the sensor, the rover will follow simple feedback logic to stay on course.
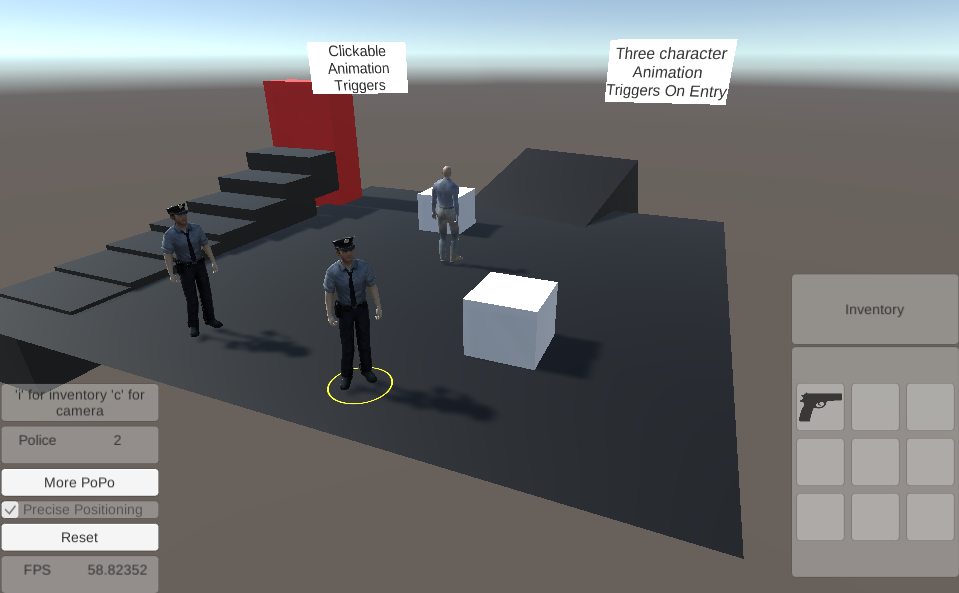
AI PATHFINDING AND CUSTOM ANIMATION TRIGGERS
An example of using a WebGL deployed application created in the Unity3d game engine.
The Humanoid characters (modified in blender) follow a navigation mesh using an AI agent to pathfind. Each humanoid can be invidually selected and are animated according to the AI agent driven MecAnim locomotion animation states. Custom code was written for screen space to world space conversion for inventory transfer and for syncing animations within the animation trigger zones.